
| General spring data | Spring free motion | Spring damped free motion |
| Forced vibration no damping | Damped forced vibration | Helical compression spring design |
Spring Equations Summary

| Work done on an elastic spring during compression or extension: |  |
| Work done on an elastic spring during compression or extension from rest, is known as the elastic potential energy. |
 |
| The force exerted by the spring on the body which deforms it: |  |
| The equivalent spring constant K of n springs connected in series. |  |
| The equivalent spring constant K of n springs connected in parallel. |  |
Spring free motion equations
|
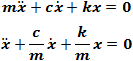
when there is no external force and no damping (Second order homogeneous system).
The motion of a spring with initial conditions x(t=0) = 2 and x'(t=0) = 0 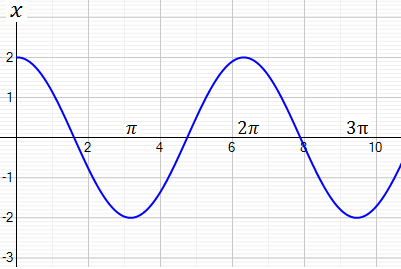 |
 The solution of this equation is an oscillatory motion of the form
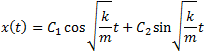 The solution can be expressed in more general form as:
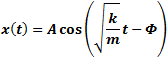 Where A and Φ are constants that depends on the initial displacement and the initial velocity at t = 0.
|



Spring damped free motion equations
Motion equation of damped free motion spring is:
This is a second order homogenous differential equation with constant coefficients, we assume an exponential solution of the form x(t) = A est (all values of m, c and k are > 0). After substituting this solution to the motion equation we have:


This is the characteristic equation whose solutions are:

Because the values of m, c and k are all positive the value of the square root is less then c/2m and therefore the values of s1 and s2 are always negative.
We have to distinguish between three cases which depends on the value under the root:
Overdamped motion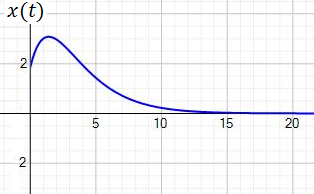 |
 r1 and r2 < 0 |
critically damped motion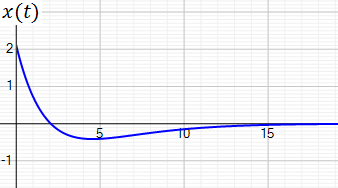 |
 The critical damping is:
 cc is the boundary of changing the motion from vibratory mode to non vibratory motion. |
underdamped motion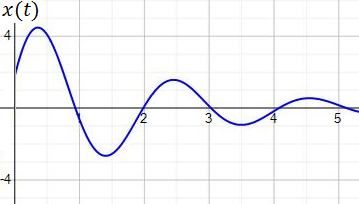 |
 Where
  If we replace A and B by the values:  We obtain:
 |
Forced vibration with no damping
The general solution to this differential equation is:
 A and B are constants to be determined by the initial conditions.
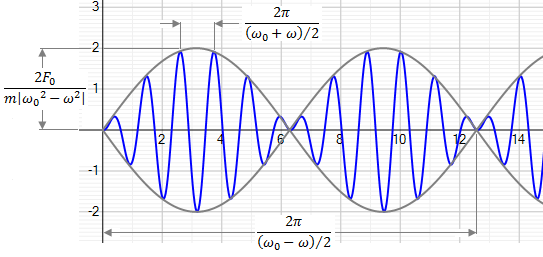
This motion is the sum of two periodic functions of different periods and the same amplitude (variation of the amplitude with time is called amplitude modulation in electronics).
After some geometric substitutions we get another form of the solution:

It is interesting to analyse the case when the forcing period ω is very close or
equal to the natural period ω0 in this case the solution of the motion equation turns to be:

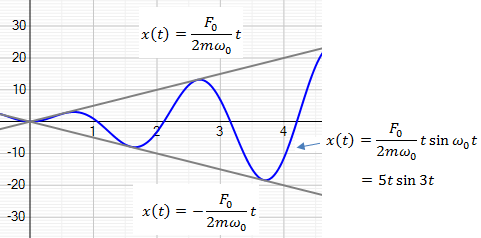
Because of the term t sin (ω0t) this answer is diverging when t is becoming
very large values no matter of the values of A and B, this phenomenon is known as resonance.
and is the reason why in real mechanical systems
the excitation frequency should be different as much as possible from the natural frequency.
A real spring can not elongate more then its designed length otherwise it will break, in this range the spring constant k is assumed to be linear.
|
|||||||||||||




Forced and damped vibration
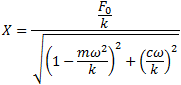
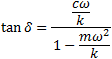
The more accurate motion equation of spring with damping and external periodic force is:
 approach zero when t gets large values, that is because s1 and s2 are both negative numbers, approach zero when t gets large values, that is because s1 and s2 are both negative numbers,this term has impact only on the beginning of the motion and is known as the transient state, as t increases the solution of the equation becomes the steady state form.
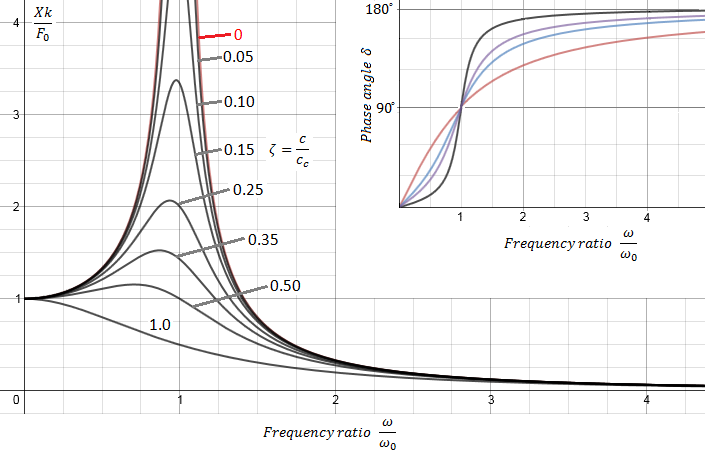
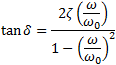
Because the value under the root of the amplitude is never zero even when ω = ω0 , it is
obvious that the motion is a constant amplitude sinusoid motion and the amplitude is depending only on the values of m, c, k and the
frequencies ω and ω0 .
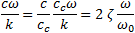
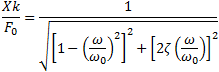
The values of X and δ can be expressed as nondimensional values by dividing the numerator and denominator by k to obtain:
 |
|||||||||||||||||||||||





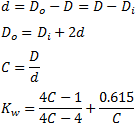
Helical compression spring design
Spring geometric scheme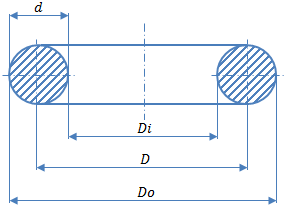
|
 |
|||||||||||
| Spring constant (k) calculation. |

G - Module of rigidity [kg/m]
n - Total active coils. |
|||||||||||
| Spring shear (τ). | 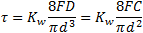 |
|||||||||||
| Spring deflection (y). |  |
|||||||||||
| Module of rigidity (G). |

E - Elastic modulus.
ϵ - Poisson ratio. |
|||||||||||
| Maximum force Fmax on a spring [N]. |  |
|||||||||||
| Maximum shear τmax stress [Pa]. |  |
|||||||||||
|
N - total coils
n - total active coils
|
Plain end |  |
||||||||||
| Plain and ground ends | n = N - 1 | |||||||||||
| Squared ends | n = N - 1 | |||||||||||
| Squared and ground ends | n = N - 2 | |||||||||||
| Spring wire length. | L = π D n |
|||||||||||
| Spring solid length (fully compressed). | Lsolid = N d |
|||||||||||
| Spring free state pitch. |  |
|||||||||||
| Coils free state angle measured from the surface perpendicular to spring axis. |  |
|||||||||||